2022 07 14
 |
계층 구조에 컴포넌트를 추가하여 물체를 마우스로 이동시킵니다.
(1) 계층구조에서 추가하여 사용하면, 어떤 물체가 움직일 수 있는지 볼 수 있습니다. 다만 계층구조가 복잡해 질 수 있습니다.
(2) 액터컴포넌트로 구현하면, 어떤 물체가 움직이는지 파악하기 힘듭니다. 추가하고 제거할 때 변수를 설정해야 합니다.
이동시킬 때 거리가 멀리 떨어져 있는 경우, 의도치 않게 한번에 많이 움직일 수 있습니다.
다른 구조물에 의해 이동이 불가능 할 수 있습니다.
AxisMovement
계획
-
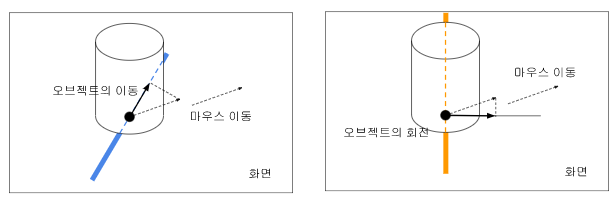
마우스의 움직임에 따라 물체를 이동시킵니다.
-
이동의 경우 물체를 잡고 드래그 하면, 마우스가 이동한 만큼 이동해야 합니다.
-
이동시킬 때 거리가 멀리 떨어져 있을 때 움직이는 경우를 고려해야 합니다. 의도치 않게 많이 움직일 수 있습니다.
-
다른 구조물 등에 의해 이동이 불가능한 경우를 고려해야 합니다.
(1) 1.에 대해 이동하는 축이 하나인 경우, 프로젝션 하거나, 최대 한 가까운 경우로 만들 수 있습니다.
(2) 1.에 대해 한번에 여러 축을 이동 하는 경우, 평면에 대한 충돌로 위치를 구할 수 있습니다. - 예로 XY, XYZ를 생각하면, XYZ는 바라보는 방향을 노말로 하는 평면에서 XY축으로 이동할 수 있지만 Z축으로 이동하는 것을 구현하는 방법을 모릅니다. - 위의 이유로 인해 1.을 부합하지 못합니다.
-
AxisMovement는 움직일 수 있는 평면을 기준으로 마우스가 클릭된 지점의 레이가 교차하는 점을 구합니다.
-
상대좌표의 설정은 교차하는 점의 상대좌표를 이동할 수 있는 범위에 클램프 시켜서 작동합니다.
(3) 4.에 대해 물체가 충돌하여 멈췄을 때 옆으로 이동할 수 있습니다.
(4) (3)에 따라 충돌한 노말을 기준으로 이동할 수 있습니다.
에디터에서 범위를 적용받을 액터에 범위를 미리 적용되지 않음.
충돌한 물체가 물리 시뮬레이션 중 일 때 힘을 적용하여 밀어내는 것을 추가할 수 있습니다.
움직일 수 있는 평면이 어느정도인지 에디터에서 보여줄 수 있습니다.
 |
AxisRotation
계획
-
마우스의 움직임에 따라 물체를 회전시킵니다.
-
회전의 경우, 축에서 멀리있는 점을 잡고 회전시키면 작게 회전하고, 축에서 가까이 있는 점을 잡고 회전하면 보다 많이 회전하게 됩니다.
(1) 마우스의 위치값을 기준으로 회전시킵니다. 처음 선택한 점과 변경된 위치정보를 가지고 계산합니다. 이 위치정보를 기억해야 합니다.
(2) 마우스의 이동값을 기준으로 회전시킵니다. 오차가 발생할 수 있습니다. 이 오차는 매우 작습니다. - 뷰포트를 기준으로 회전을 적용시킬 수 있습니다. - 평면을 기준으로 회전을 적용시킵니다.
- 뷰포트의 트렌스폼으로 오브젝트를 회전시킵니다.
(3) 충돌시 각운동량을 구해서 작성하는 경우, 질량이 복잡합니다.
-
강체란 물리학에서 형태가 변하지 않는 물체를 가리킵니다. 외력이 가해져도 크기나 모양이 변형되지않거나 변형되는 정도가 무시할 수 있을 만큼 작다면 강체로 가정하기도 합니다.
- 회전운동(Rotational motion)과 병진운동(Translational motion)
- 회전운동이란 물체가 한 점을 축으로 회전하는 운동을 말하며 병진운동이란 평행이동 즉 질점계의 모든 질점이 똑같이 이동하는 운동을 말합니다. 강체의 가장 일반적인 운동은 질량중심의 병진운동과 질량중심을 지나는 축에 대한 회전운동의 결합입니다. 이 운동을 설명 할 때 기본적으로 두 가지의 조건이 만족 되어야 합니다. 첫 번째는 회전축은 물체의 대칭축 이어야 하고, 물체의 질량 중심이 회전축 상에 이썽야 합니다. 두 번째는 회전축이 움직이더라도 그 방향은 달라져서는 안됩니다.
- 앞서 말한바와 같이 강체의 운동은 병진운동과 회전운동의 합으로 나타낼 수 있습니다. 예를 들면, 달리는 차의 바퀴를 생각해봤을 때 질량 중심의 속도는 v, v`벡터들은 각 지점에서의 질량중심에 대한 상대속도를 나타내며 이것은 중심축에 대한 회전운동의 속도를 말합니다. 움직이는 바퀴에 대해 복합적인 운동을 관성계에서 보면, 각 호부분의 실제 속도는 두 벡터의 합이 됩니다. 바퀴가 지면과 접하고 있는 점은 순간적으로 그 속도가 0이 됩니다. 또 바퀴의 맨 윗부분은 속도가 질량중심 속도의 2배가 되고, 양 옆의 점들의 속도는 수평면과 45도 각도를 이루고 있음을 알 수 있습니다.
-
UPrimitiveComponent::AddImpulseAtLocation 타고 들어가면, 코드를 볼 수 있습니다.
- 회전운동을 어떻게 로테이션으로 바꾸는가.
(4) 카메라를 기준으로 오브젝트를 바라 볼 경우,
- RightVector를 회전해서 더한다.
- … 까먹음
(5) 오브젝트를 기준으로 카메라를 바라볼 경우
(6) (5)에서 화면상에서 이동하기전의 마우스 이동 포지션을 가르키는 벡터 v1과 이동 후의 마우스 이동 포지션을 가르키는 벡터 v2의 회전량을 구할 수 있습니다. - 안움직이는 관계로 확인 불가능.
(7) (6)에서 마우스 이동량은 벡터의 회전과 관계가 있습니다.
(8) Quat를 이용하여 축에 의한 회전을 구할 수 있습니다. UKismetMathLibrary의 RotatorFromAxisAndAngle을 확인 할 수 있습니다.
APlayerCameraManager* PCM = UGameplayStatics::GetPlayerController(this, 0)->PlayerCameraManager;
FQuat Quat = FQuat(PCM->GetActorUpVector(), -Deleta.X) * FQuat(PCM->GetActorRightVector(), -Deleta.Y);
Target->AddWorldRotation(Quat/*, true, &HitResult*/);
- Quat의 로테이션은 왼손자표계인가요?
- 쿼터니언 곱셈 순서좀 그만 까먹자.
(9) Sweep이 안되서 확인해보니 SetWorldRotation은 Sweep을 지원하지 않음?? 대신 월드에서 직접 Querry할 수 있음.
TArray<FHitResult> HitResults;
const FVector& Pos = Target->GetComponentLocation();
FQuat Quat = Target->GetComponentQuat() * FQuat(PCM->GetActorUpVector(), -Deleta.X) * FQuat(PCM->GetActorRightVector(), -Deleta.Y);
FComponentQueryParams Parms(FName(), Target->GetOwner());
GetWorld()->ComponentSweepMulti(HitResults, Primitive, Pos, Pos, Quat, Parms);
(10) 트렌스폼까지 고려하면 너무 복잡함. Sphere에 대한 인터렉션으로 변경함.
Sphere에 대해서 인터섹션은 없지만, FMath::SphereDistToLine은 있따.
- Overlap이 호출될라면, Overlap이여야 한다.
할 수 있는 방법을 나열하고, 어느 정도 구체화 한다음. 선택해서 구현하는 방식을 해야 하나?
충돌하는 지점이 어디인지 확인하기 위해 찾아봐야 합니다.